| 今年度から名城大学附属高等学校はSSH(スーパーサイエンスハイスクール)指定校となりました。そしてメカトロ部は、本校代表の科学系クラブとして、SSHに取り組むことになりました。下表は取り組みの一覧です。 |
| ・2006年後半〜2007年(予定) | ||
| 研究テーマ | 目的 | 主な内容 |
|---|---|---|
 トライボロジーの研究 |
トライボロジーとは摩擦・摩耗・潤滑のことです。摩擦の科学とも呼ばれています。 摩擦の少ない潤滑剤の製作や性質等の研究する 2007年度本校代表発表 |
ひたすらコマを回してどの潤滑剤やコマや台座の状態が回転するかを調べる |
 LEDを使用した植物に関する研究 |
波長の異なる光をメダカと植物に照射して成長の違いを比較する | 青、赤、緑、白、(植物には太陽、メダカには蛍光灯を追加)を照射 |
 2代目人型2足&動物型4足歩行ロボット |
・より高度な動作(ヒトや動物の動作に近い)ができるロボットの製作。 ・老若男女が楽しむことができる(癒されるような)ロボットの製作。 |
サーボモーターを使用した人型2足&動物型4足歩行ロボットの設計(CAD作図)・製作・プログラミング |
  |
||
| ・2006年前半〜2006年後半 | ||
| 研究テーマ | 目的 | 主な内容 |
|---|---|---|
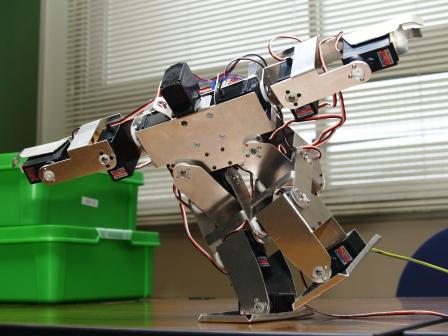
 ロボットアーム |
実際に字を書くことができる、ロボットアームの設計と製作を通じて、社会に貢献できるロボットアームを開発するため。 2006年度本校代表発表 |
サーボモーターを使用したロボットアームの設計・製作・プログラミング |
 ロボットハンド |
日頃なにげなく使っている『手』について以下の疑問を解消するため。 1、なぜ5本指があるのか。 2、なぜ『手』がいるのか。 3、『手』の構造はどうなっているのか。 4、5本の指を各々自立して動かすことのメリットはなにか。 |
サーボモーターを使用したロボットハンドの設計・製作・プログラミング |
人型2足歩行ロボット |
・ロボットの基本的な構造や仕組みの研究。 ・将来の研究(人の役に立つロボットの研究)に生かすため。 |
サーボモーターを使用した人型2足歩行ロボットの設計・製作・プログラミング |
 6足歩行ロボットの走行速度の高速化 |
・よりまっすぐ高速に走行するロボットを作るため。 ・改良結果を将来製作するロボットに生かすため。 |
6足歩行ロボットの改良・研究 |
  |
||
<全て研究紹介ポスター(SSH東海地区フェスタ展示用)より引用> |
||
|
研究に関する詳細資料を御覧になりたい方は,各研究テーマ名をクリックしてください。 |
|
 |
PDFファイルをご覧になるには、「Adobe® Acrobat®(無料)」が必要です。お持ちでない方は左記アイコンをクリックしてダウンロードしてください。Adobe® Acrobat® はAdobe Systems Incorporatedの登録商標です。 |