| 2007年現在までの製作ロボット一覧 |
| このほかにもたくさんのロボットを製作してきました。分かり次第掲載していきます。 |



| ・2006年 | ||
| 製作ロボット | できること | |
|---|---|---|
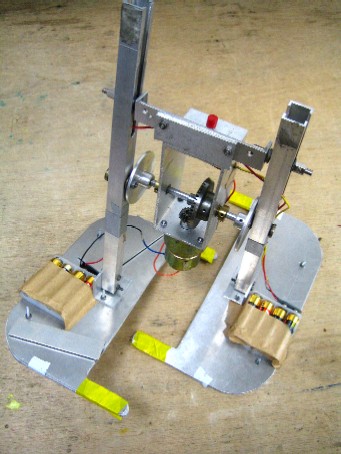
 ロボットアーム |
質量200gまで、直径5㎝までのものを持ち上げて、プログラム通りに動かすことができる。ペンを持たせて、簡単にカタカナやSSHのような文字を書かせることができる。 2006年SSH生徒研究発表会で本校代表として発表! |
|
 ロボットハンド |
人間の手を忠実に再現したため、人間の手がどのような手になっているのか分かる。したがって、今回は関節の自由度は各指の第一関節において、軸の向きは本来2本あるが人間の手の形に近づけるため一本で作った。そのため、ものを握るといった動作は少々難しいが、人間の手における各指の曲がり方がどうなっているのか、現実味のある動作が得られた。 | |
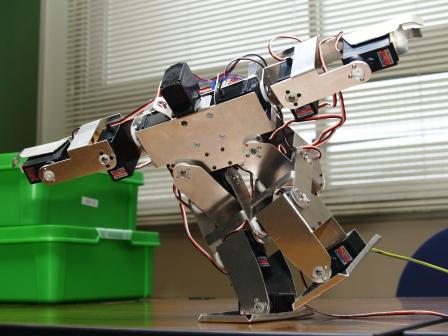 人型歩行ロボット |
2足歩行などの基本動作のほかに ・第二名城体操 ・腕立て伏せ ・ダンスにごん ・お礼 |
|
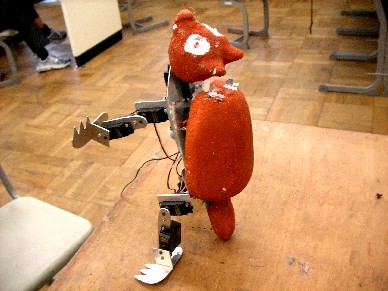 動物型歩行ロボット |
4足歩行などの基本動作のほかに ・立つ・座る・伸び・踊り・跳び・お手など もきちんとしつけされています。 |
|
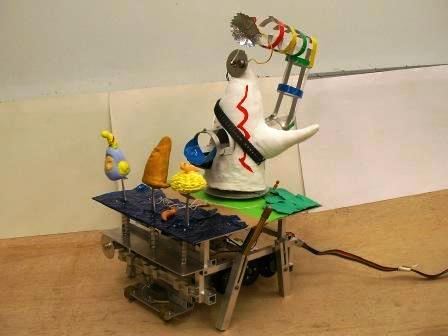 豊田クリエイティブ大賞参加ロボット |
・歩行 ・段差を上る ・ピンポン球入れ ・各ロボットごとのパフォーマンス ANT号:クリエイティブ大賞受賞! ALIAN号・亀衛門号:審査員特別賞受賞! |
|
 ??? |
アッタカーマークスリに搭載されたロボット。詳細は謎に包まれている不思議なロボット。 | |
 6足歩行ロボット |
一年生(新入部員)の一番最初に作る大会参加用ロボット。できることは,高速で直進すること。ロボットの基本(道具の使い方や製作の難しさも)を学ぶこともできる。 | |
 とよた科学創造フェスタ2006参加ロボット |
・歩行 ・段差を上る ・ピンポン球入れ ・各ロボットごとのパフォーマンス Junck・Attacker Mk-Ⅱ号・かめじょー号:ユーモア賞受賞! |
|
| ・2005年 | ||
| 製作ロボット | できること | |
|---|---|---|
 センサーロボット? |
台座の上にある、紙の色の違いをセンサーが識別し、違いによって動作する方向をかえていく。か○ねぎ君が乗っている理由は不明。 | |
|
ロボット製作に関する詳細資料を御覧になりたい方は,各製作ロボット名をクリックしてください。 |
|
 |
PDFファイルをご覧になるには、「Adobe® Acrobat®(無料)」が必要です。お持ちでない方は左記アイコンをクリックしてダウンロードしてください。Adobe® Acrobat® はAdobe Systems Incorporatedの登録商標です。 |